Introduction to Controller
- 控制器是 closed-loop system 中处理信息、做出决策的大脑
- 控制器的输入:Error Signal e(t) = Setpoint – Feedback Signal
- 控制器输出控制信号,驱动执行器(actuator)改变被控变量(controlled variable),以调整系统输出,来消除误差
- 控制器可能控制单个 process 或是同时控制多个 processes;可能是模拟,也可能是数字,也可能是相结合的
On-Off Control
-
控制原理
-
当被控变量小于设定值,校正动作完全打开
-
当被控变量大于设定值,校正动作完全关闭
-
-
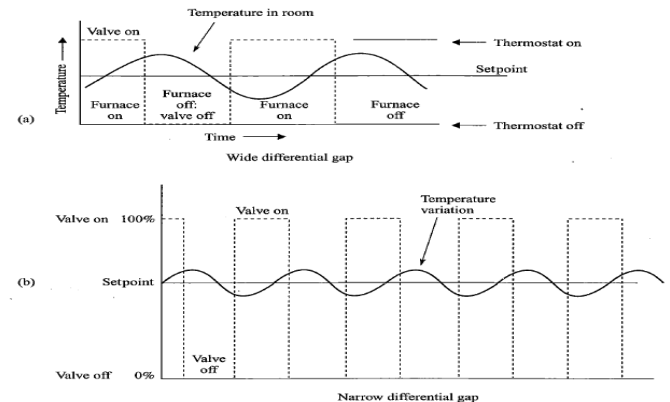
开关控制会导致周期性振荡
- 控制过程中的干扰导致输出偏离设定值(setpoint)
- 开关控制器的校正动作只能是“完全打开”或“完全关闭”,无法精确调整输出以匹配过程需求。因此,执行器的响应幅度过大,无法将过程恢复到设定值,导致温度或其他被控变量在设定值上下不断波动,形成振荡。
-
补偿措施:增加死区(Deadband)
在控制器功能中加入一个差动间隙(differential gap),也称为死区。死区要求被控变量偏离设定值一定量后,控制器才会再次改变控制动作。
-
定义:死区是引起控制器输出从开到关或从关到开的被控变量的最小变化量。
-
作用:通过增加死区,可以延长振荡之间的间隔时间,减少设备的频繁切换。 \(Differential\ Gap\ (Deadband) = \frac{Differential\ Gap}{Total\ Control\ Range}\)
-
-
缺陷
- 增加死区导致了控制的滞后性,process lag time
- 开关频繁的开关容易损毁器件
Proportional Control
-
控制原理
比例控制是一种线性控制方式,其输出与输入误差信号成正比。具体原理如下:
-
输入信号:误差信号(Error Signal),即设定值(Setpoint)与反馈信号(Feedback Signal)之间的差值。
-
输出信号:控制器的输出与误差信号成比例变化。误差越大,控制器的输出响应越强;误差越小,输出响应越弱。
-
-
Proportional Gain(比例增益)
-
定义:比例增益是指控制器输出变化量 (percentage) 与输入误差变化量 (percentage) 的比值,反映控制器对误差的放大能力。
-
数学表达: \(Gain=\frac{Percentage\ of\ Output\ Change}{Percentage\ of\ Input\ Change}\)
-
作用:增大比例增益可以加快系统对误差的响应速度,使被控变量更快地接近设定值。
Example: Whenever the temperature changes by 1 degree, or 2 percent of the span, the valve opening varies by 2 percent of its span. According to the formula, the gain is 2% output change/2% Input Change = 1.
-
-
Proportional Band (PB)(比例带)
-
定义:比例带是指引起控制器输出从0%到100%变化所需的被控变量的变化范围,通常以百分比表示。
-
数学表达: \(Gain=\frac{Percentage\ of\ Input\ Change}{Percentage\ of\ Output\ Change}\times100\)
\[PB=\frac{1}{Gain}\times100\ 或\ Gain=\frac{1}{PB}\times100\] -
作用:比例带决定了控制器输出对被控变量变化的敏感程度。PB越小,控制器对误差的响应越敏感;PB越大,响应越迟钝。
Example: Assume that the PB setting which causes the operation is 100, whenever the temperature changes by 1 degree, or 2 percent of the span, the valve opening varies the final control element by 2 percent of its span. By reducing the PB setting to 50, a temperature change of 1 degree (2 percent of the span) will cause the valve to vary by 4 percent of its span
- narrow PB
- 优点:
- 系统对干扰的响应速度更快,被控变量能更快地恢复到设定值。
- 缺点:
- 容易导致系统振荡。当系统响应过快时,容易超过设定值,然后系统试图通过反向调整来纠正误差,但可能再次过调,形成振荡。
- 如果PB过小(接近0),系统会变得不稳定,类似于开关控制。
- 优点:
- Wide PB
- 优点:
- 系统更稳定,不容易出现振荡。
- 缺点:
- 响应速度较慢,被控变量需要更长时间才能恢复到设定值。
- 控制精度较低,可能导致稳态误差(Steady-State Error)。
- 优点:
-
Proportional-Derivative Control
-
控制原理
比例-微分控制(PD)是一种先进的控制策略,结合了比例控制(P)和微分控制(D)的特点,以优化系统的动态响应。
-
比例控制(P):根据当前误差信号的大小调整输出,误差越大,输出响应越强。
-
微分控制(D):根据误差信号的变化率调整输出,能够预测误差的变化趋势,提前采取措施。
PD控制器的输出公式为: \(Output=K_p*e(t)+K_d*\frac{de(t)}{dt}\) 其中:
-
$K_p$ 是比例增益(Proportional Gain)。
-
$K_d$ 是微分增益(Derivative Gain)。
-
$e(t)$是误差信号。
-
$\frac{de(t)}{dt}$ 是误差信号的变化率。
-
-
适用场景
-
The derivative mode is used only when the controlled variable lags behinds a setpoint change and an error signal develops
-
D 控制通常运用在 controlled variable 相对系统输出存在滞后的场景中
The derivative mode is often used in a slow-acting process control application, such as regulating the temperature of a liquid in a large tank.
Derivative control would not be used is in an airflow control application. Since the response of the system is very fast, a lagging condition does not develop and the derivative control action is not required
-
D 控制绝不会单独使用,一定会和 P 控制相结合
-